
NASA Jet Propulsion Laboratory
DARPA Subterranean Robotics Challenge
Paper
Copiloting Autonomous Multi-Robot Missions: A Game-inspired Supervisory Control Interface
International Conference on Automated Planning and Scheduling (ICAPS), June 2022
Project Page
Multi-Robot Operations for Exploration of Subterranean Environment
NASA JPL Artificial Intelligence Group
Background
My goal for this project was to advance the CoSTAR Mission Control user interface through iterative research and development. Team CoSTAR has been participating in DARPA's Subterranean Challenge (SubT). A team of robots with ground and aerial capabilities are tasked with exploring an expansive underground environment in the search of artifacts within a 60 minute time limit. This competition setting seeks to emulate development of autonomous robotic teams that can map, localize, navigate, and search for items of interest (e.g. survivors, tools, chemicals) in high-risk scenarios, such as in disaster response. JPL has interests in these applications as an analogue to subsurface planetary exploration on the Moon and Mars to search for signs of life. The SubT Challenge limits operation of the robots to a sole human operator, making the user interface–and how it works in tandem with various autonomy subsystems–a crucial aspect for a successful performance. In this work, we design and develop a user-interface which aims to increase the sole operator's situational awareness of an autonomous robot fleet, reduce context switching by integrating features usually accessed across several interfaces into one application, and increase overall performance and time focused on scoring during a competition setting. While this interface was developed with a competition setting in mind, the design of the system could be applied to other areas where a deployment of robotic fleets, especially those with time constraints, can provide benefit, such as disaster response scenarios or space explorations.
Experience & Learnings
Crafting High-Performance 3D UIs
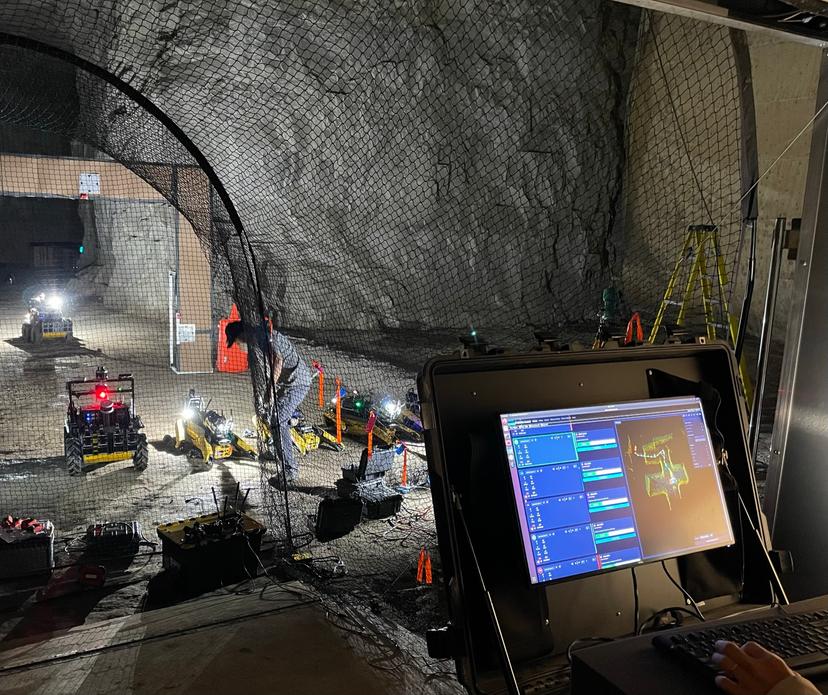
The system needed to be robust to processing and visualizing expansive and unknown underground environments explored by up to 11 robots in multi-agent autonomy. The UI was optimized and stress-tested to be stable in the Kentucky Underground limestone mines totalling nearly 5k meters of exploration in a single 60 minute competition session.
In comparison, during these stress-test sessions, RViz would eventually slow down to 1-2fps and crash while this custom WebGL-based UI would stay stable at 60fps rendering the thousands of pieces of geometry necessary for operator control and situational awareness.
Operating, Safety, and Programming of Robotics Hardware
Full understanding of the system from operator to hardware to inform rapid design & feature iteration

Boston Dynamics
Spot
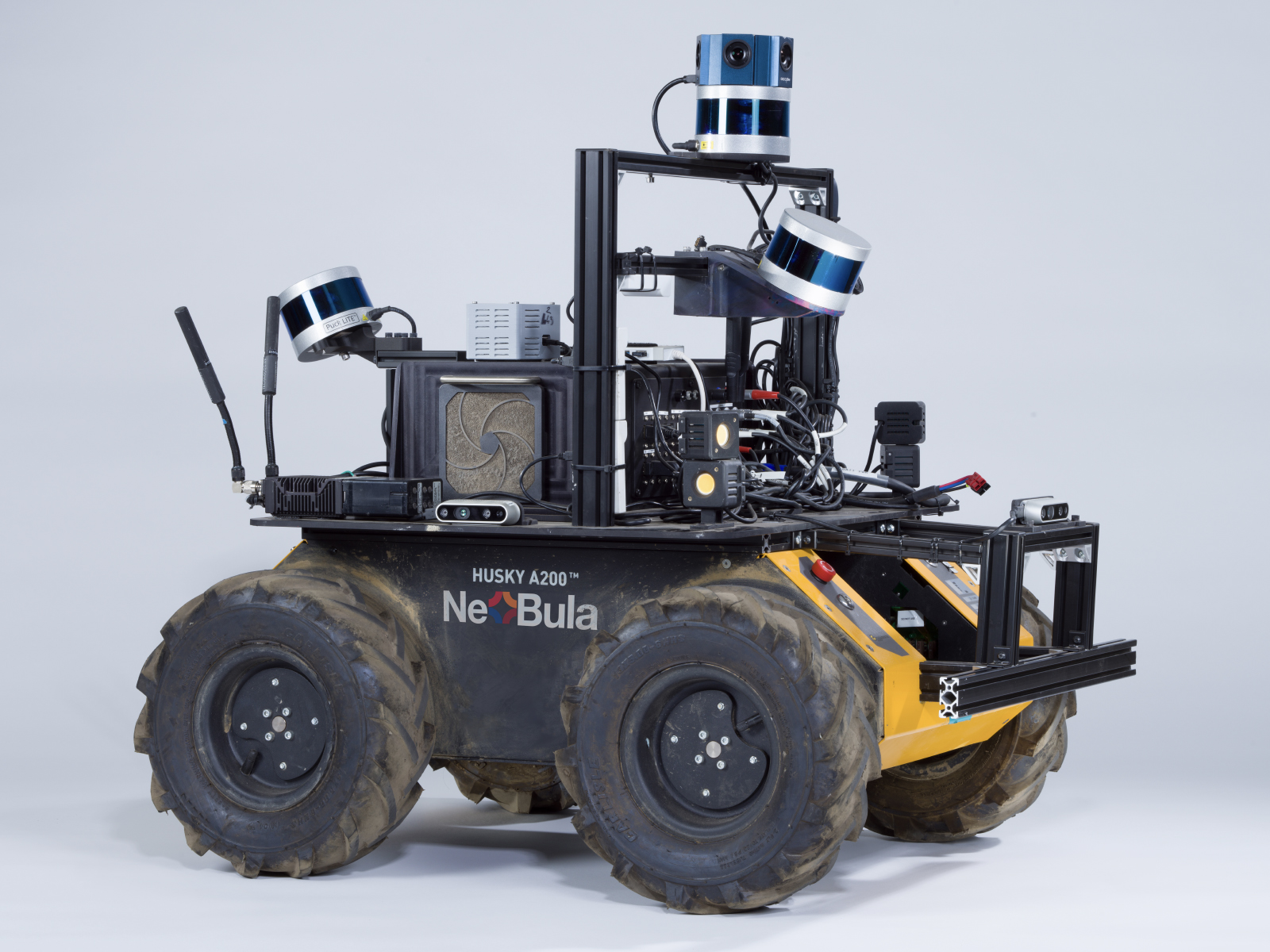
Clearpath Robotics
Husky UGV
Rapid Field Research for Robotics Operations
ROS Experience in a Large Multi-robot Project
Collaboration across many sub-teams to integrate and prioritize features for the competition