University of Southern California
Robotics Localization, Path Planning, Inverse Kinematics
Paper
CSCI 445 - Final Project Report
University of Southern California, December 2019
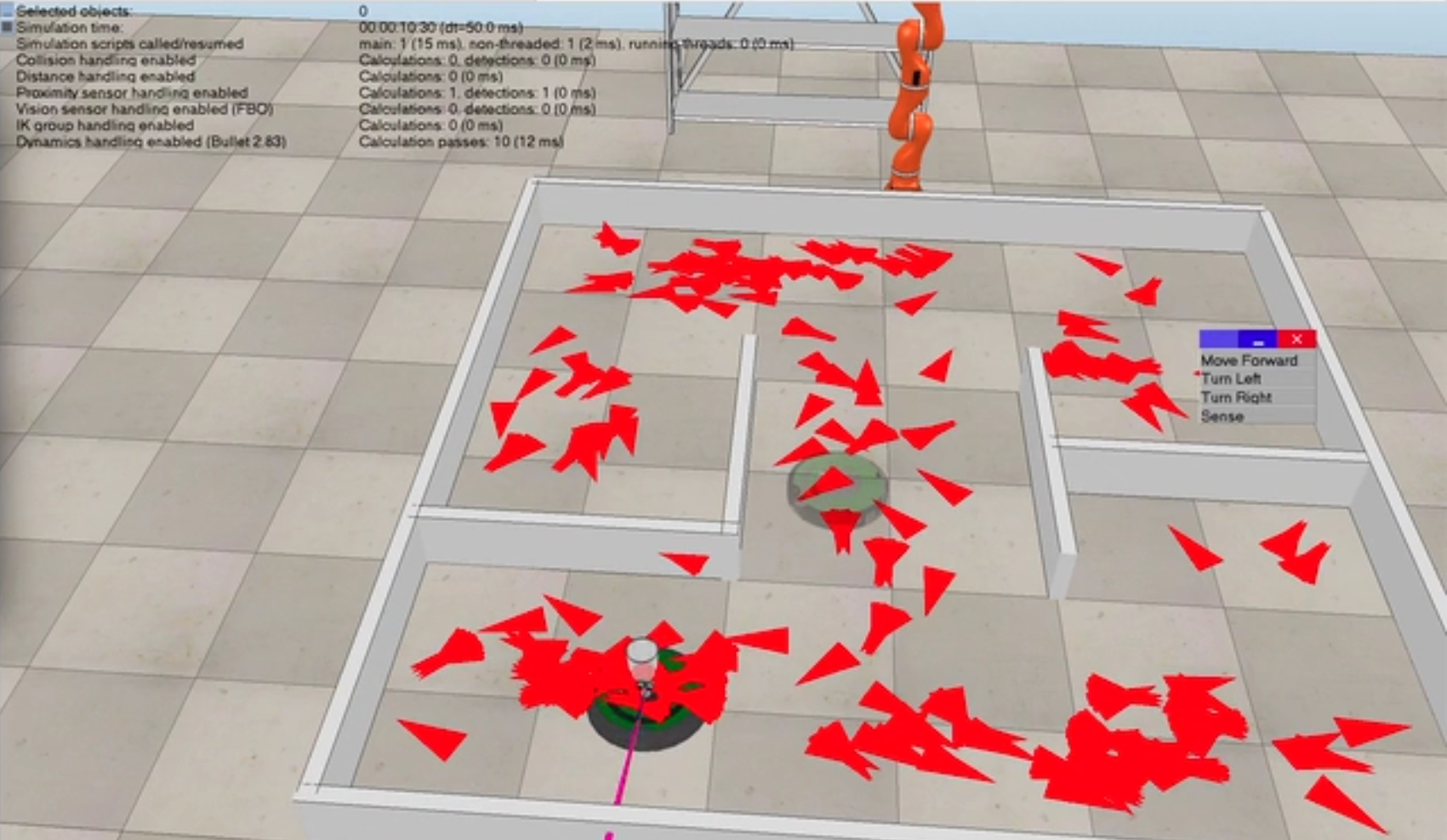
Gallery
Overview
Developed algorithms to autonomously localize and navigate an iRobot Create Roomba with a single forward-facing sonar sensor in an unknown environment utilizing particle filtering and RRT to deliver a small and delicate payload to a KUKA arm. Implemented inverse kinematics for arm manipulation to accurately grab and place the payload on a shelf. All steps up to the KUKA arm were also tested and working on actual hardware. Additionally, learned concepts of control theory and how to implement and tune PID controllers.